
DDPM
Paper | Colab code | 中文 Note | 英文 Note |
Hung-yi Lee大神 原理推導影片
Diffusion model 主要在學習如何將 noise 從資料中移除
但要添加怎樣的 noise ? 還有要添加多少比例的 noise ?
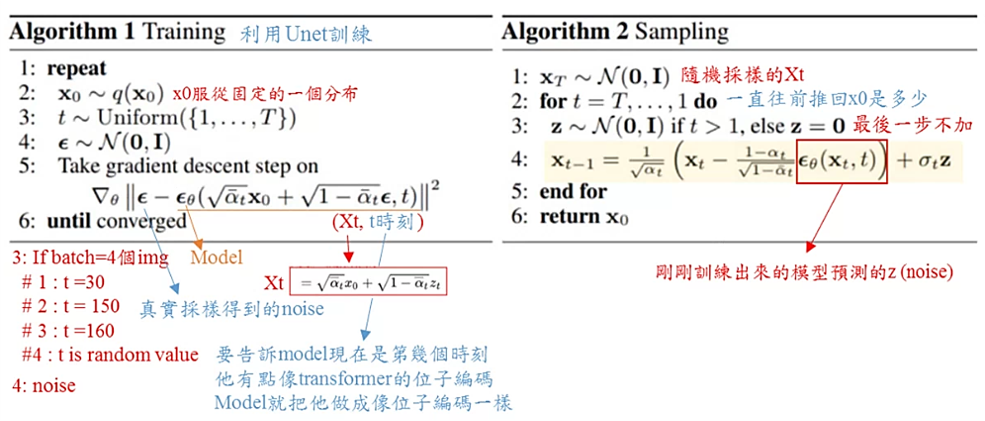
Forward step(前向過程/擴散過程): 一步步加完噪音(就是個label)之後得到純noise的圖,如果將噪聲變成一個label是不是有可能就可以把圖片還原了
在論文中,有一個 hyperparemeter β_t 需要自己設定,他影響到添加noise的比例
α_t = 1 - β_t
def linear_beta_schedule(timesteps):
beta_start = 0.0001
beta_end = 0.02
return torch.linspace(beta_start, beta_end, timesteps)
# define beta schedule
betas = linear_beta_schedule(timesteps=timesteps)
每一個時間點加上的 noise 比例都是不一樣的 (default: 0.0001 ~ 0.02),所以才有 β,一開始添加一點點 noise 可能原圖就很大,所以一開始 β 會比較低一點。
z_t: 是在 t 時間點的 noise (noise 服從常態分佈)x_0: 原圖x_t: 添加t個noise的圖
因為這部分我只選我看得懂的推導,比較艱深/正確的推論方法就請看李大神的影片。
為什麼要設定這個?
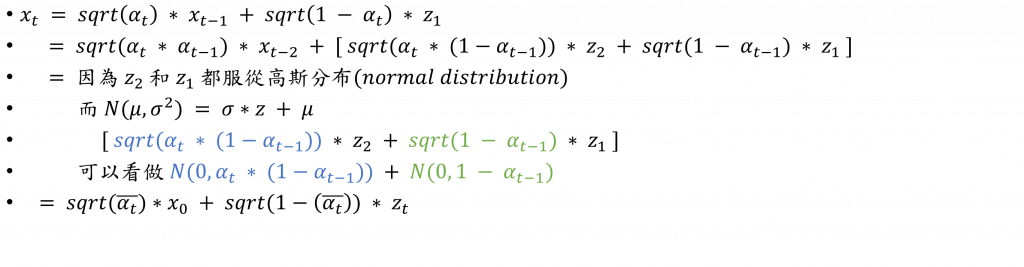
其實是因為他們已經先推導過,發現必須要這樣設定才能利用 normal distribution 的公式去再進行推算,否則無法做結合。
所以有了這個closed function之後,只需要原圖x_0和目前是第幾步(t)是多少,就可以求出最後的答案
# forward diffusion
def q_sample(x_start, t, noise=None):
if noise is None:
noise = torch.randn_like(x_start)
sqrt_alphas_cumprod_t = extract(sqrt_alphas_cumprod, t, x_start.shape)
sqrt_one_minus_alphas_cumprod_t = extract(
sqrt_one_minus_alphas_cumprod, t, x_start.shape
)
return sqrt_alphas_cumprod_t * x_start + sqrt_one_minus_alphas_cumprod_t * noise
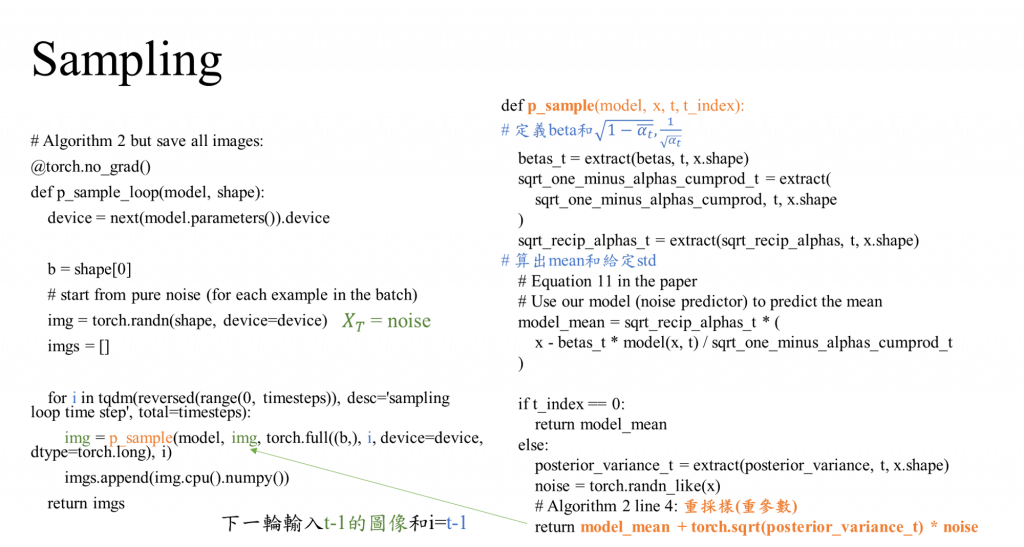
Sampling 逐步還原不帶noise的原圖
因為推導過程比Forward複雜,如果想了解的人李大神會講解。
假設T=200,加完Noise的圖x_T是已知,反推回原圖x_0,直接推回去原圖有點困難,目前還沒做到,而且產生的效果不好,所以他們決定推一推前一個 T = 199 是什麼圖?
最終想要求的東西是P(x_0|x_T),但這個太難,所以改求P(x_{T-1}|x_T)
可是又不知道x_(T-1)怎麼求,只知道P(x_T|x_(T-1)),所以這邊可以用貝葉式公式
求個近似解,訓練一個模型在x_t時刻的noise z_t是多少?
model 還原的過程中可能會不同,因為預測不出真正的z_t,所以只能靠模型去預測
z_t看來無法直接求解,只能訓練一個模型來計算x_t和時刻t
posterior_variance 是為了增加推理中的隨機性,而額外增添的一項。
在DDPM論文中,已透過實驗證明β_t = σ^2可用,所以為了計算方便,源碼中也選用了後者β_t = σ^2。
model_mean = sqrt_recip_alphas_t * (
x - betas_t * model(x, t) / sqrt_one_minus_alphas_cumprod_t
)
要對一個time做成位子embedding, Tensor(128, 112)
對這個time embedding做成 Tensor(128, 28),要跟x做一個結合
在transformer當中 x+position embedding得到實際x的code
輸出如下 tensor(128,28,28,28)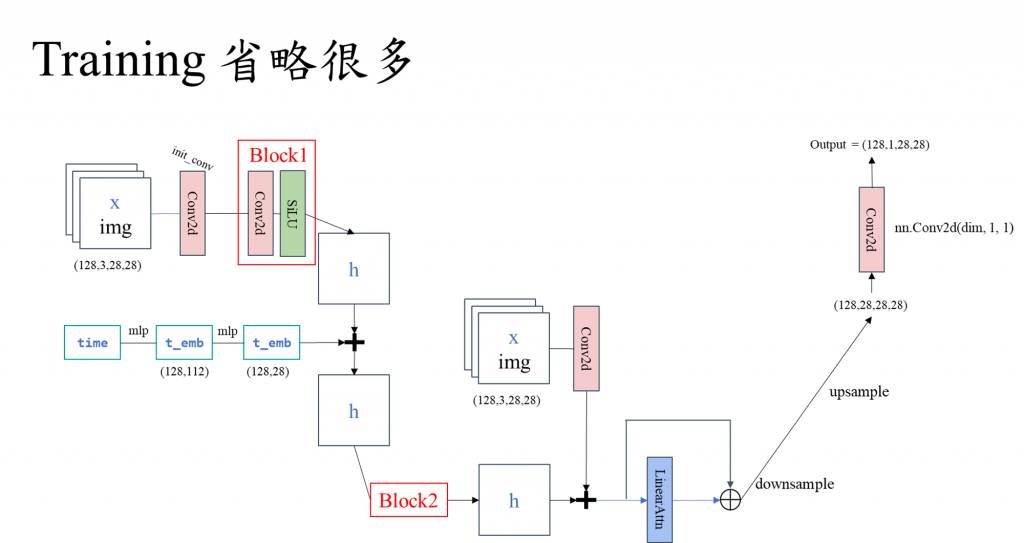
本篇是DDPM 是將時間資訊直接做加法
後續改進新版的CILP是融入圖的feature和文本的feature和時間
CILP的ATTN是可能有意義的,他可能圖像的某個特徵是跟文本上有對應

 iThome鐵人賽
iThome鐵人賽